































































































































展會信息2025-01-14
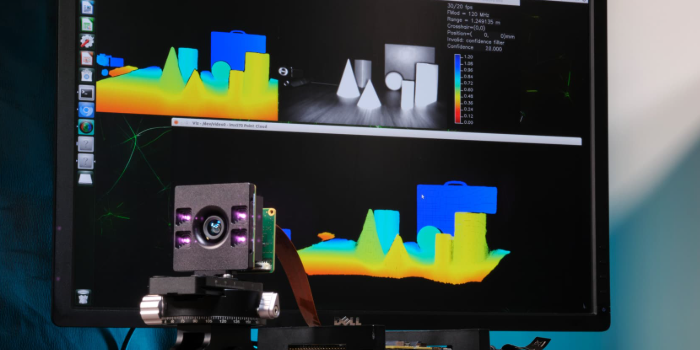
激光線掃相機在工業(yè)檢測、逆向工程等領(lǐng)域應(yīng)用廣泛,,其獲取的深度數(shù)據(jù)需要經(jīng)過一系列處理才能得到最終的三維模型,。本文將介紹激光線掃相機深度數(shù)據(jù)的高效處理方法及關(guān)鍵步驟,幫助讀者了解并掌握這一技術(shù),。
一,、數(shù)據(jù)采集:良好的開端是成功的一半
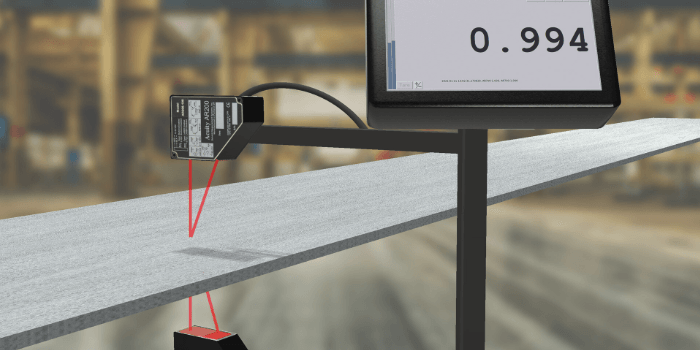
1、選擇合適的掃描速度和分辨率:掃描速度過快會導(dǎo)致數(shù)據(jù)丟失,,分辨率過低會影響模型精度,。根據(jù)實際需求選擇合適的參數(shù)。
2,、保證光照條件穩(wěn)定:光照條件的變化會影響深度數(shù)據(jù)的質(zhì)量,。盡量在穩(wěn)定的光照環(huán)境下進(jìn)行數(shù)據(jù)采集,,或采用主動光源。
3,、標(biāo)定相機參數(shù):準(zhǔn)確的相機參數(shù)是進(jìn)行后續(xù)數(shù)據(jù)處理的基礎(chǔ),。在數(shù)據(jù)采集前,需要對相機進(jìn)行標(biāo)定,,獲取其內(nèi)參和外參,。
二、預(yù)處理:為后續(xù)處理打好基礎(chǔ)
1,、去除噪聲點:深度數(shù)據(jù)中 inevitably會存在一些噪聲點,,需要使用濾波算法將其去除。常用的濾波算法有高斯濾波,、中值濾波等,。
2、數(shù)據(jù)補全:由于遮擋等原因,,深度數(shù)據(jù)中可能會存在一些缺失的部分,需要進(jìn)行數(shù)據(jù)補全,。常用的數(shù)據(jù)補全方法有基于鄰域的方法,、基于模型的方法等。
3,、點云配準(zhǔn):如果需要將多個視角的深度數(shù)據(jù)融合成一個完整的三維模型,,需要進(jìn)行點云配準(zhǔn)。常用的點云配準(zhǔn)算法有ICP算法,、NDT算法等,。
三、三維重建:點云數(shù)據(jù)“化繭成蝶”
1,、點云三角化:將點云數(shù)據(jù)轉(zhuǎn)換成三角網(wǎng)格模型,。常用的三角化算法有Delaunay三角化、泊松重建等,。
2,、網(wǎng)格簡化:三角網(wǎng)格模型的頂點數(shù)和面數(shù)通常很多,需要進(jìn)行簡化以提高后續(xù)處理效率,。常用的網(wǎng)格簡化算法有邊折疊算法,、頂點聚類算法等。
3,、紋理映射:如果需要為三維模型添加紋理,,需要進(jìn)行紋理映射。紋理映射即將二維圖像映射到三維模型表面,。
四,、模型優(yōu)化:精益求精,,追求完美
1、模型平滑:去除模型表面的噪聲和尖銳邊緣,,使模型更加光滑,。常用的模型平滑算法有拉普拉斯平滑、雙邊濾波等,。
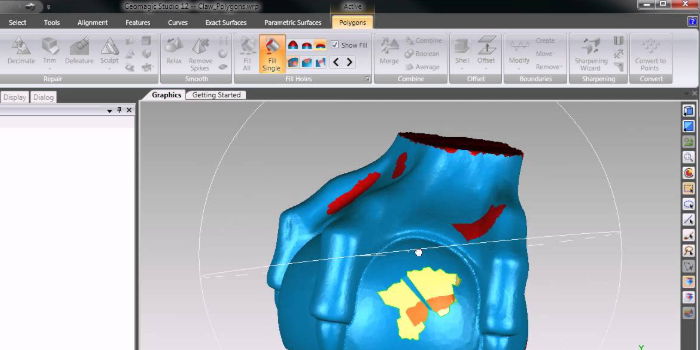
2,、孔洞修補:修補模型表面的孔洞。常用的孔洞修補方法有基于鄰域的方法,、基于模型的方法等,。
3、模型簡化:進(jìn)一步簡化模型,,減少頂點數(shù)和面數(shù),,提高渲染效率。
五,、軟件工具:事半功倍的利器
1,、Geomagic Studio:一款功能強大的三維掃描數(shù)據(jù)處理軟件,可以進(jìn)行點云處理,、三維重建,、模型優(yōu)化等操作。
2,、CloudCompare:一款開源的點云處理軟件,,功能豐富,操作簡便,。
3,、MeshLab:一款開源的網(wǎng)格處理軟件,可以進(jìn)行網(wǎng)格簡化,、平滑,、修補等操作。
以下是您可能還關(guān)注的問題與解答:
Q:激光線掃相機深度數(shù)據(jù)處理的難點是什么,?
A:難點主要在于噪聲處理,、數(shù)據(jù)缺失、點云配準(zhǔn)等方面,。
Q:如何提高激光線掃相機深度數(shù)據(jù)的處理效率,?
A:選擇合適的算法和軟件工具,并對數(shù)據(jù)進(jìn)行預(yù)處理可以提高處理效率,。
Q:激光線掃相機深度數(shù)據(jù)處理的應(yīng)用有哪些,?
A:應(yīng)用于工業(yè)檢測、逆向工程,、三維建模等領(lǐng)域,。
激光線掃相機深度數(shù)據(jù)處理是一個復(fù)雜的過程,,涉及多個步驟和多種算法。掌握這些關(guān)鍵步驟和方法,,選擇合適的軟件工具,,才能高效地處理深度數(shù)據(jù),并獲得高質(zhì)量的三維模型,。